https://j.people.com.cn/n3/2026/0311/c95952-20434896.html
https://ieeexplore.ieee.org/document/11399261
A research team led by Wang Hongbo at the University of Science and Technology of China, has developed a sensor that can be integrated into the fingertips of robots, providing crucial perceptual capabilities for robots to “operate by touch like humans”.
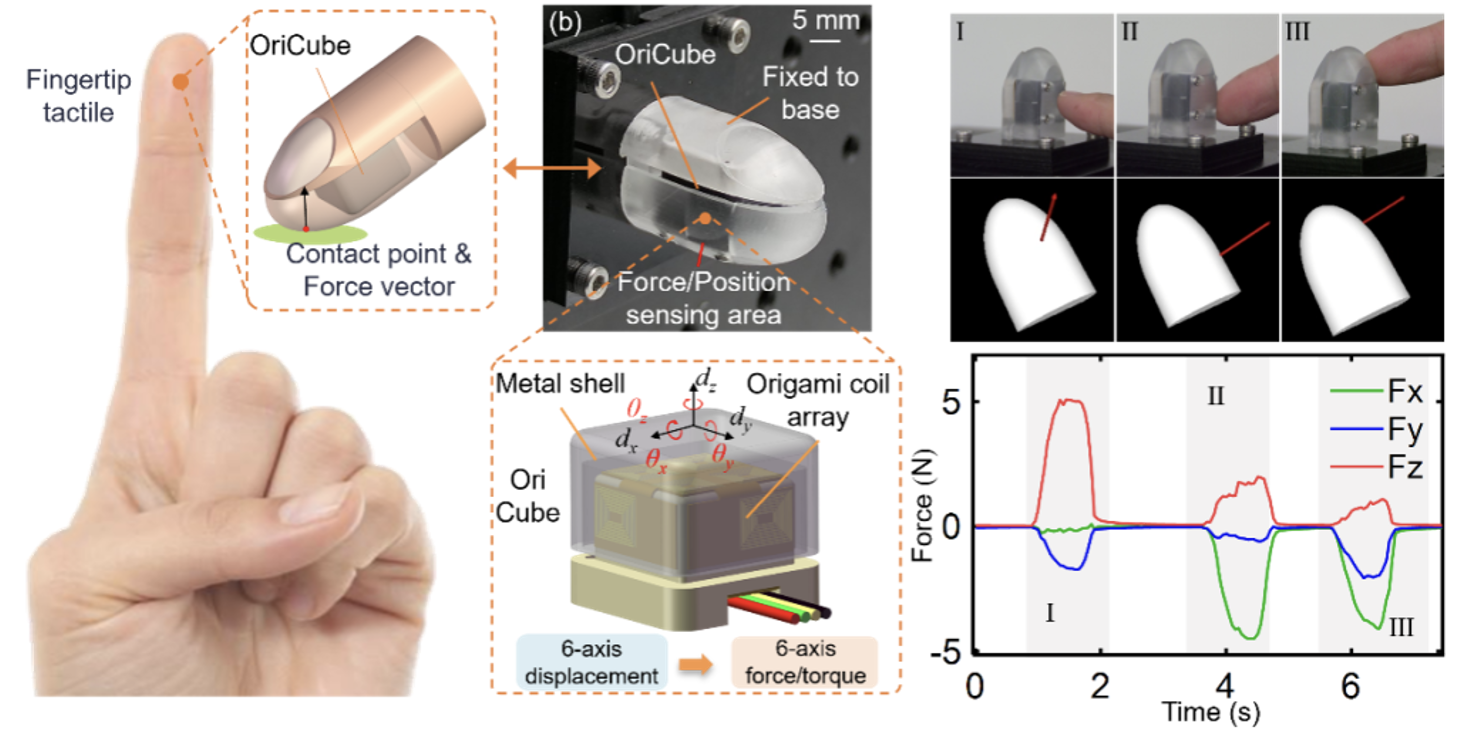
The 6-axis force/torque (F/T) Hall-effect based A sensor, named “OriCube,” has a volume of only 14 x 14 x 12 mm³ and weighs only 4 grams, making it possible to integrate it into the dexterous fingertips of robots. This sensor can detect even the slightest contact, such as the touch of a feather, while also being able to withstand impact pulses from hammer blows.
The OriCube, developed by the research team, employs a three-dimensional coil arrangement based on origami structure, enabling simultaneous measurement of minute displacements and rotation angles across the six degrees of freedom (translation and rotation) of its metal shell. Its miniaturized packaging facilitates integration into robot fingertips. The mechanical design allows for adjustment of the stiffness in each axial direction, achieving a balance between sensitivity and measurement range by tailoring the design to specific needs.
Rigid calibration and testing have confirmed that, in addition to its small size, light weight, and low power consumption, the OriCube effectively suppresses interference from external magnetic fields, providing robots with stable and reliable sensory information even in complex working environments. Experimental results demonstrate that this research provides crucial tactile sensory information for robots to skillfully perform complex tasks in uncertain environments.