http://english.cas.cn/newsroom/research_news/tech/202502/t20250221_902350.shtml
https://ieeexplore.ieee.org/document/10848317
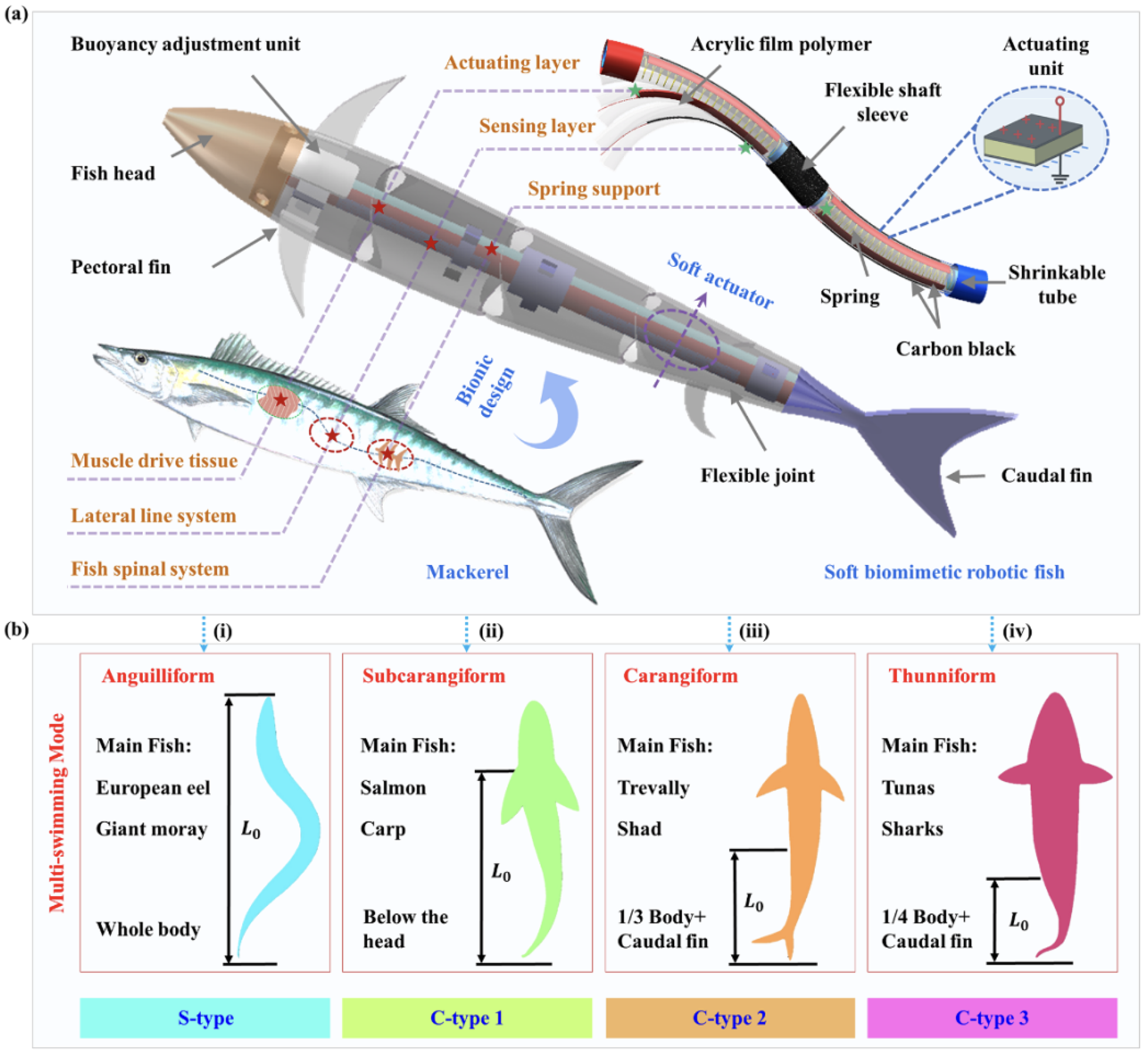
Researchers from the CAS Shenyang Institute of Automation have developed a multi-mode swimming soft robotic fish. By collaboratively controlling the amplitude and phase of excitation from the multiple flexible actuating units, the soft robotic fish can successfully realize various swimming modes very similar to those of natural fish. Additionally, the embedded flexible sensing elements enable the robotic fish to sense the swimming state and the surrounding fluid environment in real time. The multiple actuation and embedded sensing allow the soft robotic fish to adaptively switch to an optimal swimming mode in a certain fluid environment.